epsilon-约束方法
$\varepsilon$-约束方法(这样GUROBI也能解多目标问题了!)
一般解决多目标优化问题的算法都是NSGA-II算法、MOEA-D算法等多目标智能算法。采用Gurobi精确求解的方法往往难以求出pareto最优解,只能通过对多个目标进行加权的方式求解。今天我们学习一种方法,借助它我们也可以使用Gurobi等求解工具求解多目标优化算法,且其求解效果比加权法更好。
$\varepsilon$-约束方法简介
$\varepsilon$-约束方法是一种多目标优化算法。它基于约束优化的思想,通过引入一个参数$\varepsilon$来控制目标函数的权重,从而保证满足约束条件的前提下,寻找到最优解的近似解集。
通过选取一个主目标函数,将其余目标函数转化为约束,从而计算每个子优化目标,得到帕累托解集。
过程
针对一个多目标优化问题:
$$
min {f_1(x),f_2(x),f_3(x)} \
h(x)=0 \
g(x)\leq 0
$$
使用ε约束算法转化问题为:
$$
min f_1(x) \
f_2(x)\leq \epsilon_2,\cdots,f_n(x)\leq\epsilon_n \
h(x) = 0 \
g(x) \leq 0
$$
其中的每个参数$\epsilon_2,\epsilon_3,\cdots,\epsilon_n$通过计算payoff矩阵得到。
payoff的计算过程:
求解出第i个目标函数的最优值$f_i(x_i^*)$,得到其最优解$x_i^*$;
将$x_i^*$代入其他目标函数得到${f_1(x_i^*),f_2(x_i^*),\cdots,f_n(x_i^*)}$;
对全部目标函数按照上述流程求解,得到payoff table矩阵如下:
$$
\begin{bmatrix}
f_1(x_1^*) & \cdots & f_i(x_1^*) &\cdots & f_n(x_1^*)\
\vdots& \ddots &&& \vdots\
f_1(x_i^*) & \cdots & f_i(x_i^*) &\cdots & f_n(x_i^*)\
\vdots& \ddots& & & \vdots \
f_1(x_n^*) & \cdots & f_i(x_n^*) &\cdots & f_n(x_n^*)\
\end{bmatrix}
$$
该方法本质上与网格搜索法相同。得到了payoff矩阵之后,可以求出每个目标的最优值和最劣值(就是每个目标维度的最大和最小值)。记为最优解(U)和最劣解(SN)$f_i^U = f_i(x_i^*)$,$f_i^{SN} = f_i(x_j^*)$。
选择一个主目标函数$f_k(x)$。
对于主目标函数外的目标函数$f_{i}(x)$,设置一个网格化分数$q_{ij}∈{1,2,\cdots,q_i,max} $。
由此计算除了主目标函数外的其余目标函数的ε约束如下:
$$
ϵ_{ij}=f_i^{SN}−\frac{(f_i^{SN}−f_i^{U})}{q_{ij}}⋅j \qquad j=1,2,…,q_{i,max}
$$
得到每个优化子问题如下:
$$
min f_k(x)\
s.t. \qquad f_1(x)\leq \epsilon_{1j},f_2(x)\leq \epsilon_{1l},f_n(x)\leq \epsilon_{1m},h(x)=0,g(x)\leq0
$$
其中,$j=1,2,\cdots,q_{1,max};l=1,2,\cdots,q_{2,max};\cdots;m=1,2,\cdots,q_{n,max};$
每次求出一个最优解,若在可行域内则加入帕累托解集,若不在可行域内则丢弃。
例子
$$
min \quad f_1(x) = x_2-x_1 \
min \quad f_2(x) = x_1+x_2 \
s.t. \qquad x_1^2 - 2x_1 + 1 \leq x_2 \
0 \leq x_1 \leq 1 \
0 \leq x_2 \leq 1
$$
使用python+gurobi求解代码如下:
1 | #!/usr/bin/env python |
求解结果展示如下
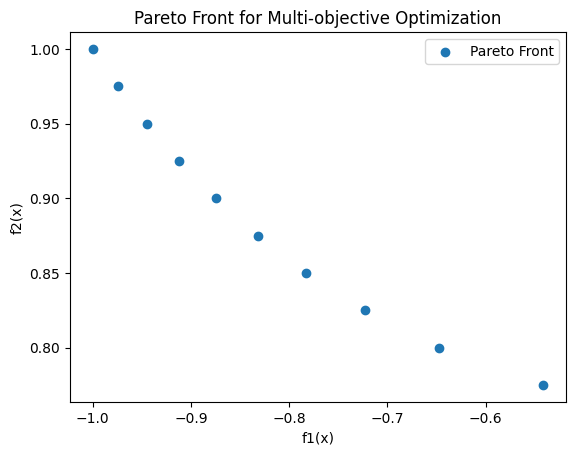
网格化分数取10时:
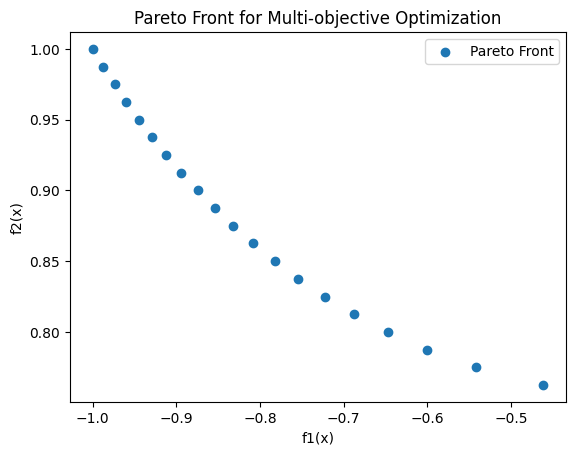
网格化分数取20时:
网格化分数取100时:
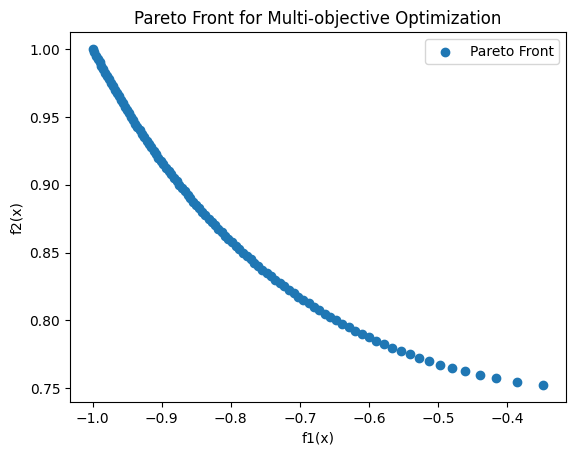
可以看到,这个方法有一个很好的性质,就是可以通过增大网格化分数来改善求解结果,使其更接近真实帕累托前沿。如果求解时间过长可以减小网格化分数来缩短求解时间。
参考文献
[1] Ismail-Yahaya A, Messac A. Effective generation of the Pareto frontier using the normal constraint method[C]//40th AIAA Aerospace Sciences Meeting & Exhibit. 2002: 178.
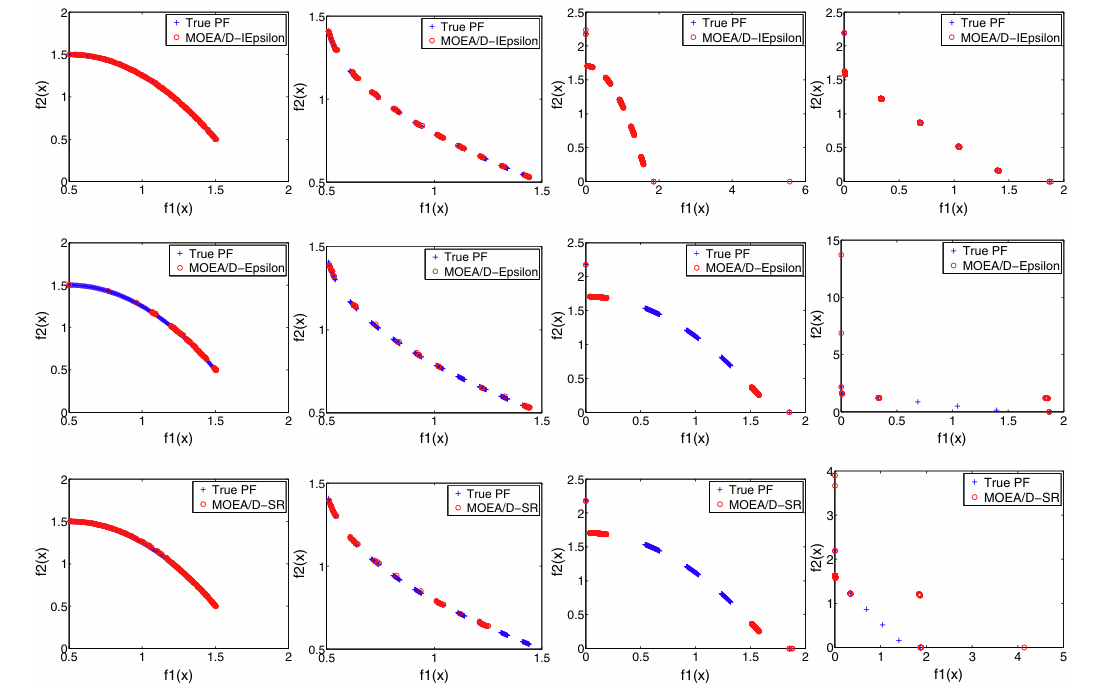
[2] Fan Z, Li W, Cai X, et al. An improved epsilon constraint-handling method in MOEA/D for CMOPs with large infeasible regions[J]. Soft Computing, 2019, 23: 12491-12510.
[3] Yang Z, Cai X, Fan Z. Epsilon constrained method for constrained multi-objective optimization problems: some preliminary results[C]//Proceedings of the companion publication of the 2014 annual conference on genetic and evolutionary computation. 2014: 1181-1186.